【空軍】【海軍】根深蒂固的誤解(二)
2020-06-14 09:09:00
原文网址:https://blog.udn.com/MengyuanWang/138538769
另一個在中國論壇裏被尊爲共識的誤解,技術性比較高些,亦即有關艦載機降落航母時的操作。這應該源自中國沒有通用航空,評論者自己沒有飛行經驗,也聽不懂真正飛行員的解釋與糾正,於是以訛傳訛,到最後大家把沉澱出來的錯誤論述當做真理。
這裏我引用施洋的文章(參見https://www.toutiao.com/i6836148676574839299/)為典型。這倒不是因爲他的水準低,剛好相反,正是因爲他是很少數我願意去讀的軍事類作者之一,而且很少犯錯,所以才值得我花時間評論。
他説:“需要區分正反區的,主要是在飛機落地或者著艦的階段。普通的陸基飛機在著陸時,使用的就是一般的正區操縱:飛行員依靠拉桿或推桿來修正高度…而當速度出現偏差時,飛行員則通過加減油門來進行調整。”
“因為艦載機著艦的時候需要有著艦位置的精確…反區操縱的關鍵,在於時刻維持飛機迎角的穩定,而對高度和軌蹟的調整則主要交給油門控制。”
用飛行員的語言來説,他描述的是兩種操作的方式:第一種是“Pitch for altitude,power for speed”,第二種剛好相反,是 “Pitch for speed,power for altitude”。問題在於最終進場(Final Approach)時應該使用哪一種,不是根據陸海差別,而是有其他的考慮。
要解釋這個議題,我必須從Power Curve和Drag Polar講起。首先請注意,如果不考慮左右轉向,飛機的正常飛行有兩個自由度:水平方向的空速(CAS,Calibrated Air Speed),以及垂直方向的升降率(Rate of Ascent/Descent)。而飛行員可用的輸入也是兩個自由度:控制引擎的油門(Power,單位是功率,又叫出力;或者Thrust,推力)和控制俯仰的操縱桿(Pitch)。如果我們限制升降率為零,也就是只考慮穩定平飛狀態,那麽對應著每一個空速值都有一組特定的Power/Pitch設定。暫時忽略Pitch,只看功率(Power)對速度(CAS)的函數,就是Power Curve,如下面第一張圖,這來自一型叫做RV-6A的自建小飛機(Home-built)。
因爲功率P=推力T*速度V,所以一旦有了PR(V)這個函數曲綫,很簡單就可以得到T(V)= PR(V)/V的新函數。但是我們考慮的是穩定平飛,所以推力(Trust)必須剛好跟阻力(Drag)對消,於是D(V) 也等於 PR(V)/V可以接著被畫出來(參見上面的第二張圖),這個函數曲綫圖叫做Drag Polar(雖然嚴格來説,Drag Polar指的是升力對阻力的函數,但是升力與速度的關係簡單固定,所以阻力對速度的函數可以被當作是等價的)。一般因爲螺旋槳引擎的油門所控制的是功率,所以適合用Power Curve來做分析;噴射引擎的油門則決定推力,必須改用Drag Polar。
Power Curve的最低值代表著剋服阻力所消耗的功率最小,而輸出功率與燃料使用率成正比,所以也等於是燃料使用率最低,因此這個空速對應著最長滯空時間(Maximum Endurance)。Drag曲綫的最低點則代表著最小的阻力,阻力乘以距離是消耗掉的能量,既然一箱油所含的總能量是固定值,阻力小對應著距離長,所以這個空速是最大航程速度(Speed of Maximum Range)。如果飛機失去動力,必須緊急迫降,一般應該把速度定為Best Glide Speed(最佳滑翔速度);這裏同樣是在固定的總能量(這個情況下是重力位能)限制下,尋求最大航程,所以同樣要求阻力最小,換句話説,最佳滑翔速度基本就是最大航程空速(必須忽略因引擎工作狀態不同而造成的阻力函數變動)。因爲平飛時,升力必須剛好抵消重力,這是個固定值,所以最小的阻力也對應著最大的升阻比(L/D),這個空速也可以叫做最大升阻比速度。
但是時間也是金錢,最大航程空速一般被認爲在實用上太慢了,於是又定義了所謂的“Optimum Cruise Speed”(最佳巡航速度,又稱Carson’s Speed),這是D(V)/V的最低值,本文用不到,所以讀者無須細究,只要知道它代表著飛機的典型空速,氣動外型主要是圍繞著它來做優化,而且這個速度高於最大航程速度。
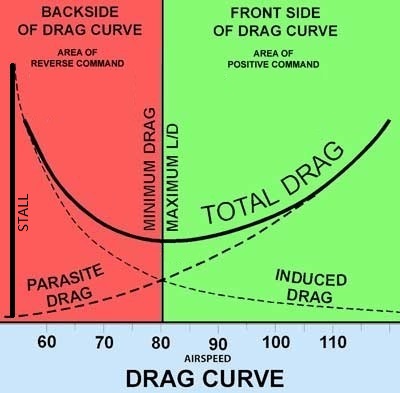
上圖是同樣的阻力對空速函數圖,不過更仔細地把總阻力分解為Induced Drag(誘導阻力)和Parasitic Drag(寄生阻力);前者與速度平方成反比,後者則與速度平方成正比,所以總阻力最小對應著誘導阻力和寄生阻力各半。阻力曲綫在最低值分界綫的兩邊有著不同的斜率:右邊的斜率是正值,叫做“正區”(Area of positive command,或者Front Side of Power/Drag Curve);左邊的斜率是負值,叫做“反區”(Area of Reverse Command, Back Side of Power/Drag Curve),反區的最左邊是失速(Stall)綫。
前面曾提到,不考慮轉彎的話,飛行軌跡有兩個自由度:空速和升降率,而飛行員則依賴改變俯仰的攻角和引擎的油門來控制和修正軌跡。但是飛機對飛控輸入的反應,在正區和反區是不同的。如果飛機處於平飛的穩定態,那麽顯然引擎的推力必須剛好抵消阻力;我們對這個阻力曲綫應該已經很熟悉了。至於攻角,則是沿著橫軸從左到右隨速度增加而遞減的,這也是很直覺的簡單事實。問題在於,當飛行員做出一個小修正時,空速和升降率會如何變化。
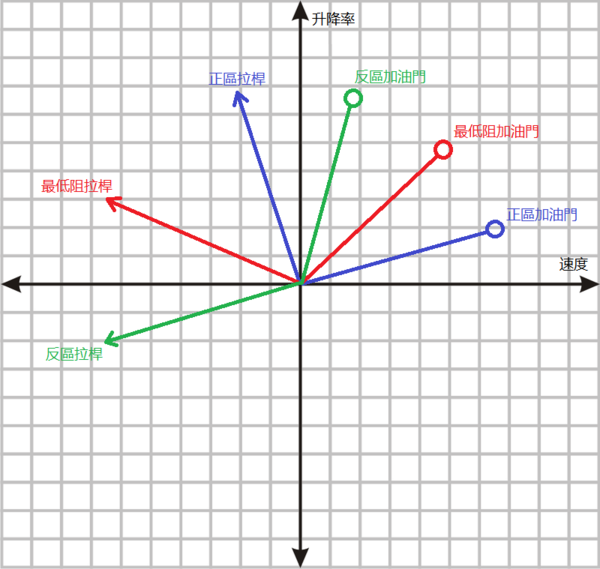
我找不到網絡上現成的教材,只好自己畫一張很簡單的定性示意圖,並不代表實際測量結果,純粹是根據阻力曲綫推論出來的。這裏只詳細討論“最低阻加油門”的案例來示範推理過程:在最低阻空速下,阻力基本不隨速度增減而變動,所以加大油門、提高推力之後,開始加速,對應的平飛所需攻角減小,既然飛行員沒有推桿,實際攻角維持不變,於是有了額外的升力,飛機開始爬升,這個爬升的角度是原攻角和新速度對應的平飛攻角的差,重力有了向後的水平分量,才抵消掉多餘的推力。
上面的推理,考慮了固定升降坡度(Ascent/Descent Slope)的案例,對飛行器來説,這和平飛的唯一差別(To First Order Approximation,到一階近似)在於重力的水平分量,這是對阻力做一個常項修正,等同於整條曲綫做上下平移,並不影響後續分析,所以針對平飛做出的結論,基本也可以應用在固定升降坡度的直飛狀態。剛好Final Approach就是固定坡度(叫做Approach Slope或者Glide Slope,一般是3°,但是如果機場有山陵或高樓圍繞,可以視需要定到更大的角度)、固定速度的直飛,所以也在適用之列。
從上面那張圖還可以簡單看出,在正區油門的效應主要在速度軸向,拉/推桿則主要影響升降率,所以“Pitch for altitude,power for speed”的操作比較自然,反區剛好相反,“Pitch for speed,power for altitude”才是方便的口訣。那麽我們關心的Final Approach,對應的是正區還是反區呢?
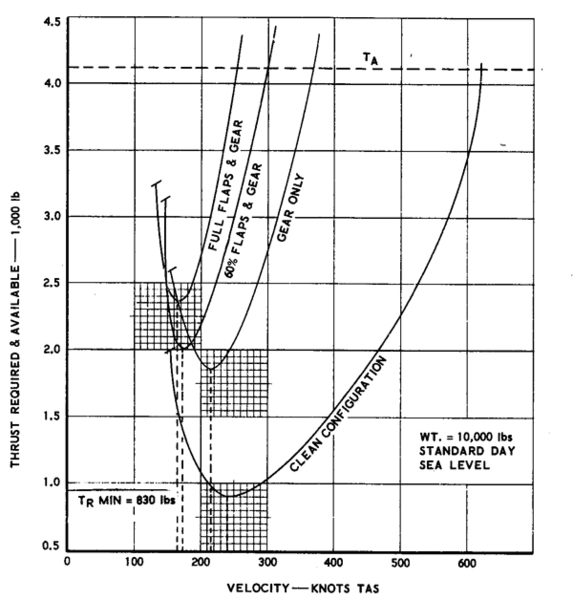
以RV-6A爲例,它是螺旋槳飛機,所以正/反區是由最長滯空速度來分割的,這個最長滯空速度是81mph,而進場速度(Landing Approach Speed)是75mph,在反區之内。RV-6A的失速發生在56mph,所以整個反區是在(56,81)的區間;75mph已經很接近後者。然後我們必須考慮這些速度值對應著乾净的氣動外形,只有進場速度是在襟翼和起落架(雖然RV-6A的起落架是固定式的,其他的飛機就可能必須算入起落架的額外阻力)放下的狀態,如果我們考慮這個狀態下的功率曲綫,它必須向左上方移動(參見下圖),所以反區也跟著向左移,其净效應是使得進場速度通常落在正/反區之間的分界綫附近;這其實也是幾乎所有小螺旋槳飛機(例如初級教練機)的共同性質。
讀者可以從稍早那張示意圖看出,在最低阻點附近的拉桿和油門操作,其作用效果也介於正/反區之間,這使得 “Pitch for altitude,power for speed”和“Pitch for speed,power for altitude”都行得通,飛行員可以依主觀偏好來選擇;實際上兩邊都有擁護者。我自己在Boston學習飛行的時候,教練屬於“Pitch for speed,power for altitude”那一派;這也是美國通用航空界佔多數的主流。
但是講到噴射機,尤其是高性能的軍用戰鬥機,那又不太一樣了。以F-18E爲例(這裏的資料來源是美國海軍部的F/A-18E/F飛行員手冊第11部《Performance Parameters》,有興趣的讀者可以到https://info.publicintelligence.net/F18-EF-200.pdf自行下載,下面的數據來自第355、60和362頁),它的最低阻力速度、失速速度和進場速度分別是180、122和136節(取總重45000磅,無外挂,進場時設定半襟翼),即使考慮放下襟翼會使整個阻力曲綫左移,進場速度仍然很扎實地在反區裏。這是噴射機的普遍特徵,也是“Pitch for speed,power for altitude”被認爲是主流技巧的因素之一。
其實艦載機著艦的程序與在陸上機場降落相比,最大的差異在於Pattern(待降航路)和Touch Down(接地瞬間),進場的過程反而是一致的(參見美國海軍航母教練準則T45C,https://www.cnatra.navy.mil/local/docs/pat-pubs/P-816.pdf):不論是坡度、速度、攻角等等參數都沒有差別,所以著艦固然須要反區操作,著陸也一模一樣。
但是施洋很明顯地有來自艦載機飛行員的評論,那他的誤解是怎麽來的呢?我猜想是飛行員描述在陸地機場降落時,可以忽略手冊上的最佳進場速度,直接以正區的高速飛向跑道,然後Flare、減速、再慢慢著陸;要在航母上著艦,可就沒有這個選項。以前在博客上提過,我也曾經應空管中心的要求,開著小Cessna以140節的極速進場,比標準的進場速度高出一倍有餘。
最新一代的戰術飛機,有著先進的電傳飛控,即使在反區深處,也可以簡單地把飛控模式設定為“Constant Descent”,這時操縱桿不直接控制水平尾翼,油門也不直接連接到引擎,而只是對飛控系統指定飛行員想要的下降坡度和速度,由電腦代爲做每秒鐘上百次的微調,使得原本一直被認爲是頂尖難度的航母著艦,一下子變成半自動的過程。連全自動著艦技術,因爲是無人機上艦的前提,也顯然已經被突破;所以下一代的艦載機飛行員,必然會有與以往大不相同的學習經歷。
【後註一,2025/07/18】學了一輩子物理,我原本自以爲對任何物理現象有足夠的直覺,能簡單做出正確的定性判斷,但剛剛看到這篇20年前的老論文(參見《Drop Splashing on a Dry Smooth Surface》),差點驚掉自己的下巴;這裏相關的物理科目是流體動力學,所以放在這篇正文之下和大家分享。
上述論文研究的對象是,足夠高速下落的水滴撞擊固體表面會產生皇冠狀的飛濺;這個現象每個人在下雨天都觀察過無數次,我個人一直以爲是水滴内部的慣性和内聚力在衝擊波作用下的結果,沒想到這些作者用實驗明確證明,飛濺現象來自水滴周圍的空氣:只有空氣密度達到海平面大氣的30%(這個臨界值對應著10公里高空,略高於Mount Everest珠峰,所以不可能在露天的地球表面觀察到,只能用真空室來做實驗)以上,因爲水滴在撞擊後向橫截面的擴展速度超過空氣中的音速,才能產生夠强的超音速激波,反過來擊碎擴展中的水-氣界面,造成許多微小水滴破開飛濺。We are never too old to learn new concept.
2 条留言
感觉您讲的战机最后进场都是反区,其实就是拉飘。我在模拟器里面,着陆一般是高速冲到机场附近再放襟翼和减速板,接着放起落架,然后快接地的时候控制一下下降率---拉飘,这个时候飞机攻角和下降率都是比较稳定的,保证接地平稳。着舰有点像把拉飘放大到整个进场过程,早早的控制好攻角和速度,把矢量对准航母斜角。毕竟着舰钩那点地方可能还没有机场跑道大白块到小白块的距离大。
航母著艦當然是沒有Flare這個步驟的,額外的空速沒有餘裕來消耗流失,所以進場的標準動作絕對必須嚴格遵循。在陸地跑道上,不但通用航空的飛行員常常爲了省時間而高速進場,軍用飛機為戰術原因也經常使用更高的進場速度,但是民航客機就不行,不但乘客的性命重要,飛機本身重量大、所需跑道長,而且在進場過程中往往是排隊的,所以和艦載機一樣必須遵守準則。
最常見的民航機出事,是在下雨天滑出跑道,這通常就是因爲飛行員沒有嚴格遵守進場速度,在跑道上空漂浮太久,著陸後刹車又受積水影響,最後只能衝出跑道末端了。
上個月的PK8303在Karachi失事,是更極端的事件:那個機長在轉入進場過程的時候,高度比規定高出三倍多,依舊不聽塔臺建議硬要著陸,於是在油門放空的前提下,空速仍然達到260節,不但比規定的130-140節高出一倍,甚至超過了A320施放襟翼和起落架的氣動安全極限,一路警告鈴聲長鳴,在跑道上空Flare的長度也遠超規定,到了跑道後端才觸地,這時機長才發現起落架根本就被機載電腦拒絕放下,著陸的是引擎,再試圖復飛已經太晚了,受損的引擎在幾十秒後就失去動力,飛機墜落在機場外的市區。
我懷疑這位機長是空軍退役的,所以視標準進場流程為無物。和施洋聊天的艦載機飛行員應該也是在描述航空兵一般的戰術運作習慣而不是標準的技術規範。不論如何,降落過程中的反區操作是很普通的事,絕非艦載機的獨有。
至於飛行模擬器,業餘的很少專注在起落過程上,對翼地效應和地表亂流的模擬都很粗糙。相反的,真正的飛行學員時間主要是花在起落過程和為它做準備上,例如近失速的深反區操作。我在受訓的時候,最討厭的就是Powered Stall,操控界面不但反應反常,而且還出現了明顯的不穩定性,再加上Stall Warning和渦流的風聲在耳邊轟鳴,對一個知道失敗可能無法重來的駕駛員來説,壓力是很大的。
减速,然后很轻松的着陆。换到现代机,进场时手感还差不多,到最后减到着陆速度的时候就感觉操控感非常的奇怪,容易重着陆。到飞舰载机苏33的时候,矢量,速度,高度都有助降提示,反而更难操作,连摔了三天才着了一次舰。后来看了教程,知道了要配平保持攻角,靠油门来控制速度和高度,成功率才有所提升,着陆也不容易磕坏起落架了。但这都是感性的认识,看了您的文章才明白螺旋桨是正区,而喷气机基本都是反区。您提到的 powered stall,在二战机的格斗倒是非常常见,因为动力不足,飞行员往往在包线边缘做各种惊险的机动,老鸟吊能量(双方都在失速边缘向上飞)就是能多吊几秒,在顶点失速之后能非常夸张地180度转向,能在pre-stall的时候依然控制机头的指向。格斗的概念上有最大瞬盘速度和(瞬时角速度最大时的速度)最大稳盘速度(最大稳定盘旋角速度时的速度)不知道这两个在数学上分别对应什么?至于现代机,反而由于飞控限制基本不会超出包线(早期三代和二代之前的除外,像f14b就没有过载限制,没经验很容易拉断)
讲到飞行模拟器,突然又有一个中美对比的例子。现在喷气机模拟最热门的是dcs(digital combat simulator)开发商兼发行商eagle dynamics是个美国公司,它开发的模组质量还不错,但是就是进度经常跳票,说今年出来明年才有消息,到明年说五月发布能跳到六月底,最后为了赶进度,甚至把抢先体验版还阉割了大量功能放出来(f16c模组发售的经历),搞得大家怨声载道,至于其他第三方开发的模组那进度和质量就更不能保证了。本来大家只能捏着鼻子用,结果来了个中国制作组dis(做的是枭龙,据说杨伟总师有过目。j10和j20大概有生之年吧),发售就有完整功能,空空雷达stt tws模式都有(大黄蜂的tws模式居然发售了半年才出,一个雷达模式而已)还有对地/海雷达(这玩意FA18承诺了到现在还没出),各种精确制导弹药,人在回路武器(fa18承诺了slamer,现在也没出),瞄准吊舱应有尽有(FA18和f16发售时都只能扔铁炸弹)直接就把老外给震了。我调侃说有了dis,才反衬出ed是在磨洋工。效率差别真的好大。
DCS裏,如果選擇只用機炮,那麽對飛行包綫的徹底熟悉就很重要了;不過我看到它模擬的Powered Stall還是遠遠太溫和、太Predictable,尤其是60年代以前的飛機,有不少實際上是很容易進入Spin尾旋,而且很難改出的。
DCS那個JF-17的套件很受歡迎,也是很好的廣告,畢竟真正的飛行員也會想玩高階的業餘飛行模擬器,尤其中東的玩家可能就有不少是空軍的。一開始游戲裏的SD-10性能遠高於AIM-120,結果出版商還必須對兩者的參數都做調整,我覺得蠻有趣的。